Hi!
I'm currently building coding evals for agents at the Rootly (YC S21) AI Labs,
and I'm working on robotics research with labs at McGill, Mila and UBC.
I'm actively looking for research collaborations with industry and academia. My current research projects include LLM benchmarking for code generation, robot perception, and RL for robot learning.
Please feel free to reach out (contact details below), I'd love to connect!
Selected Projects
View all →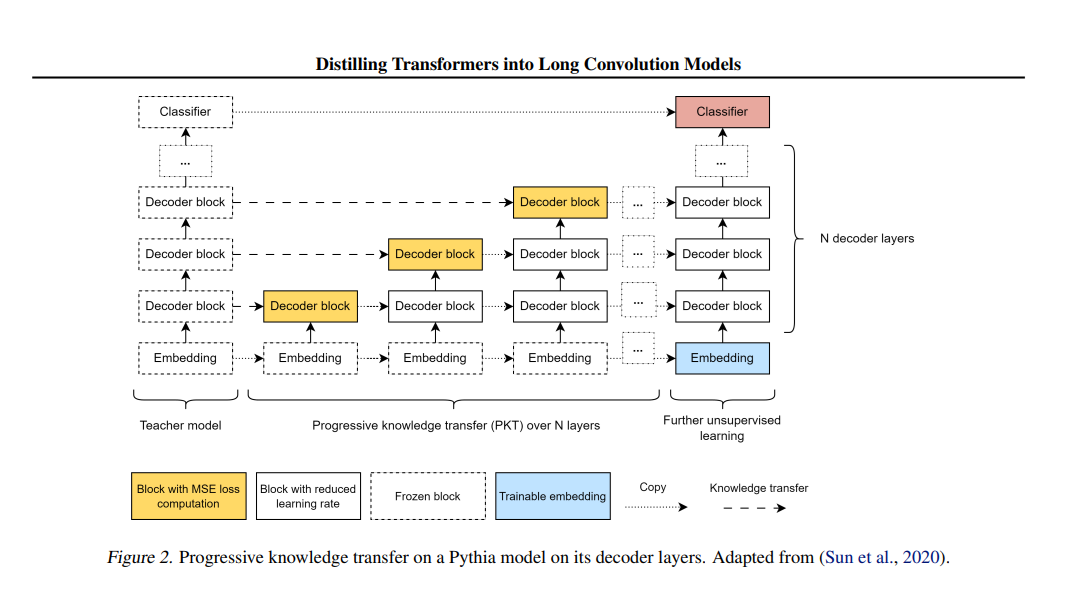
Distilling a 70M attention transformer into a Hyena 70M model. Accepted at ES-FoMo-II at ICML 2024.
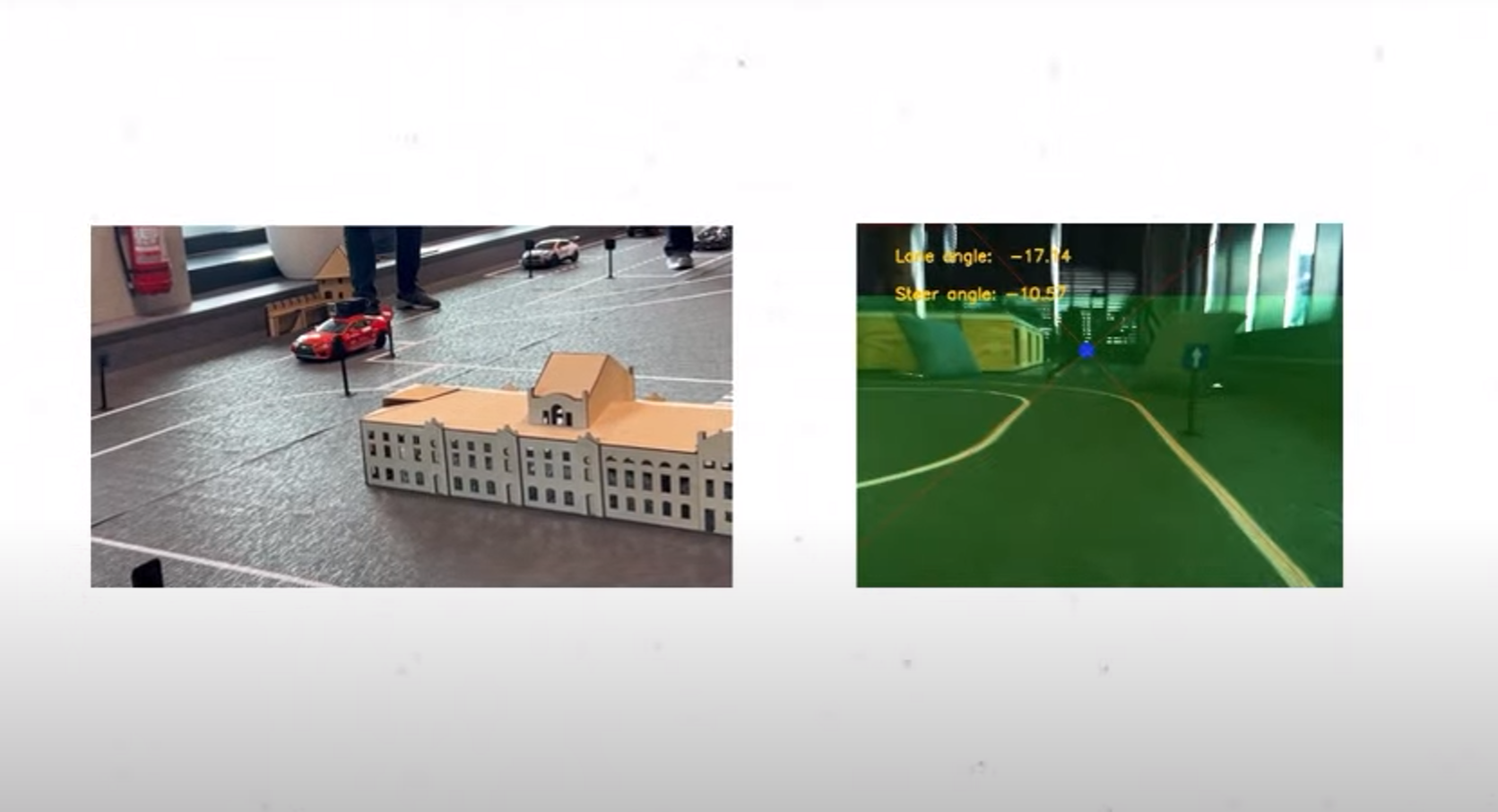
Autonomous driving using vision inputs. Placed Top 24 at BFMC 2024 in Cluj-Napoca, Romania.
Work Experience

Community Member
Cohere Labs
2026 - Present
Contributing to open source research on foundation models.
Member of Technical Staff
Rootly (YC S21) AI Labs
2025 - Present
Built LLM coding evals, accepted as workshop papers at ICML 2025, ACL 2025, and NeurIPS 2025.

Student Researcher
McGill (DECAR, SuPER, MAIS), UBC (PRIME)
2023 - Present
Multi-drone obstacle detection, RL for path planning for medical manipulators. SSM distillation (ICML 2024 workshop paper), self-refinement for LLM toxicity detection (NAACL 2024 workshop paper), LLMs for misinformation detection (SMASH 2025).
Intern (Evals)
Groq
2025 - 2025
Evaluation infrastructure. CI/CD, reproduced coding evals, and contributed to early releases for OpenBench.
Intern (Robotics, on Canadarm 2, 3)
MDA Space
2024 - 2024
Control system optimization for the Candarm 3 in simulation, and 10x speedup for the visual similarity algorithm for Canadarm 2 debris detection.
Intern (Drone R&D)
ACSL Ltd
2022 - 2022
Neural nets for drone motor performance modeling at Japan's largest industrial drone manufacturer.
Data Scientist
Perceive Now
2021 - 2023
Developed v1 of the core API, contributed to the startup raising a 6-figure round with an $8.5M valuation.
Backend Developer
Soulzone
2019 - 2019
Joined a startup and worked on Backend & Apache Solr before starting CEGEP.
Software Developer (Apprentice Program)
Expedia
2018 - 2018
Full-stack app to estimate semantic similarity between web pages.
Selected Blog Posts
View all →Open Questions: May 2026
Domain transforms and more
A Selection of Quotes
Inspiration to look up to.
Opinionated Rules for Research
Guiding principles to quickstart research projects.
How Do Reasoning Models Work?
The big picture ideas behind reasoning models.
Multipliers
Things to do to increase output.
An Epsilon-Greedy Analogy for Producing Work
Breadth vs depth trade-offs.
Connect
The best way to get in touch is through email at laurence.liang [at] mail.mcgill.ca.
If you want to meet, feel free to book directly through my Cal.com page.